| FEATURES |
| |
-
CPU with 32/64Kbytes flash memory, RAM and
EEPROM embedded
-
serial port RS232 and RS422/485 multidrop,
speed 115200 bit/s; optional Ethernet interface
-
16x2 characters LCD display, for parameter
setup, status display, alarms and so on
-
built-in navigation keyboard, featuring
UP, DOWN, ENTER and ESC keys
-
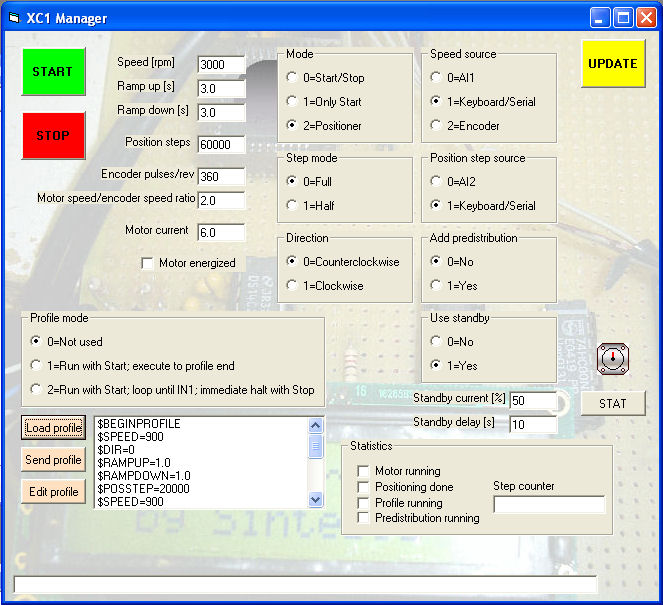
all parameters are accessible via serial
port; the free XC1 Manager software
allows total control over the device, like parameter setup,
motor start/stop, programming of the embedded PLC, device status
reading, input/output monitoring and forcing
-
embedded PLC, programmable via instruction
list or ladder logic; boolean and mathematical functions, timers
and registers are provided for maximum flexibility
-
12 digital inputs, 24Vcc PNP or NPN
-
16 digital outputs, 24Vcc 1A PNP or NPN,
depending on the model
-
4 analog inputs, 0..10V
-
1 analog output, 0..10V
-
input/output expandibility, by mean of add-on
modules
-
preloaded software suitable for the most
common labeling functions, such as applicator and label printer
control, predistribution, handling of label queue, end roll
and print signal, Assist control and so on; the functionality
is implemented using the embedded PLC, thus allowing full modification,
deletion and custom integration in order to achieve the desired
behaviour
-
supply: 30Vac 250VA
-
4A stepper motor drive, fully parametrized
via keyboard or serial port, featuring:
- two function modes: start/stop or positioner; in the start/stop
mode the motor start and stop are controlled by digital
inputs or the serial port; in the positioner mode the motor
start is controlled by a digital input or the serial port,
then the motor rotates until the desired steps are executed
and then it stops. Configurable ramps are provided for motor
start and stop
- speed up to 3000 rpm, defined via parameter setting or
proportional to an analog input, which can be connected
to a potentiometer or to a speed reference coming from a
transportation line
- acceleration and deceleration ramps separately configurable,
from 0,1s to infinite
- full-step (200 step/turn) and half-step (400 step/turn)
- current from 0 to 4A, parameter controlled
- standby mode with current reduction: the standby can be
activated/deactivated, the intervention time after the last
move can be configured, as well as the standby current;
the standby allows to reduce the current consumption while
the motor is not running, thus helping the power saving
and allowing to decrease the heat dissipation
- a move sequence can be defined; the sequence is a list
of moves, and each move has its own speed, ramp, direction,
steps to move; a digital input or a command from the serial
port starts the sequence execution; the sequence can be
executed one time or continuously, until a stop generated
by a digital input or the serial port
- external clock input provided, to drive the motor from
an indipendent clock source
- an encoder input allows the connection of an incremental
encoder, useful to synchronize the motor speed to the production
line
-
the 4A drive can be replaced with other models,
capable of more current
|
|
|
|
|
|
|